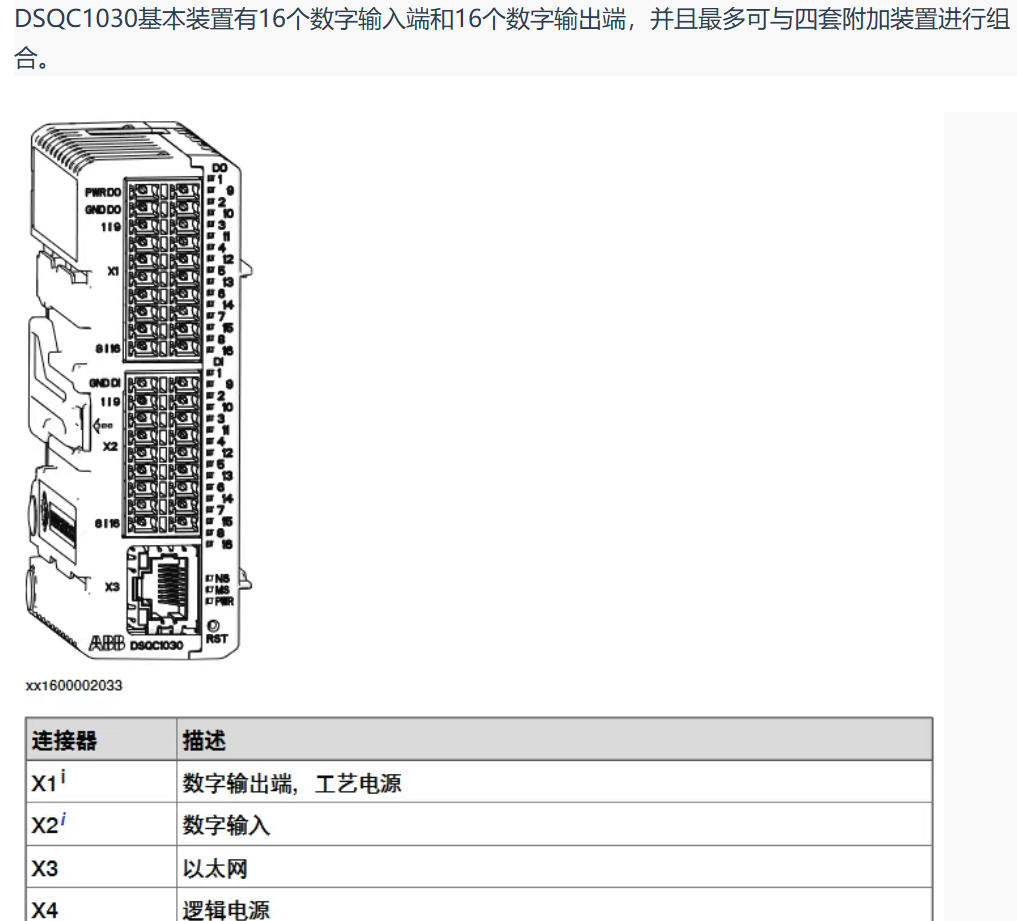
ABB 机器人的Scalable I/O 模块是基于 ABB 的分布式 I/O 系统(如 ABB Distributed I/O 或 SafeMove I/O)设计的可扩展输入输出模块,用于连接机器人与外部设备(如传感器、执行器、夹具等),支持灵活扩展 I/O 点数以适应不同场景需求。以下是其核心特点及配置方法:
模块化设计:支持多种类型模块(数字量输入 DI、数字量输出 DO、模拟量输入 AI、模拟量输出 AO、安全 I/O 等),可按需组合,灵活扩展点数。
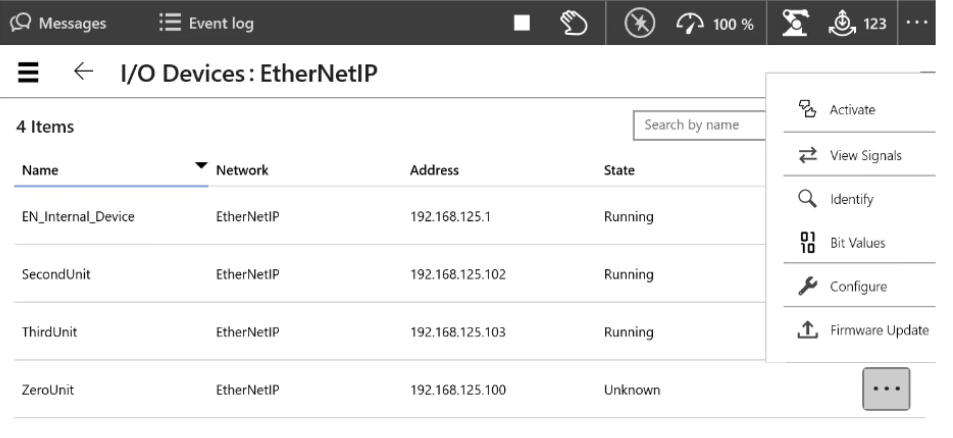
分布式架构:通过工业总线(如 Profinet、EtherCAT、DeviceNet 等)与机器人控制器(如 IRC5)通信,减少布线,适合大型工作站。
兼容性:兼容 ABB 机器人全系列控制器,支持与第三方设备(如 PLC、视觉系统)无缝集成。
安全性:部分模块支持安全功能(如 SIL2/PLd 等级),满足工业安全标准(如 ISO 13849)。
物理安装:将 Scalable I/O 模块(如 DSQC 652、DSQC 651 等)固定在控制柜或外部安装架上,确保接地良好。
总线连接:通过总线电缆(如 Profinet 网线)将模块与机器人控制器的总线接口(如 X66/X67)连接,或通过网关连接到第三方总线(如 DeviceNet)。
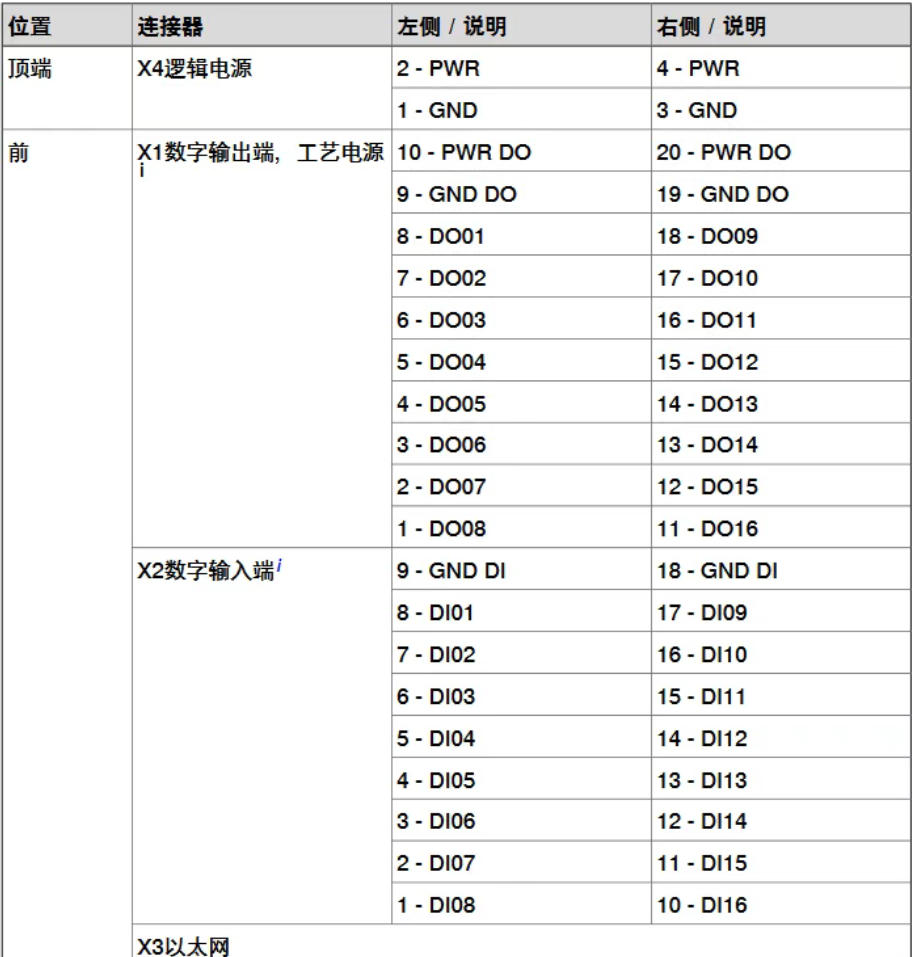
电源连接:为模块提供直流电源(通常 24V DC),注意区分模块电源和信号电源。
外部设备连接:根据模块类型,连接传感器(DI)、电磁阀(DO)、编码器(AI)等外部设备,记录接线对应的端子号。
在机器人程序中直接使用已配置的 I/O 信号名称进行逻辑控制,例如:
plaintext
IF DI_Gripper_Sensor = 1 THEN ! 检测到工件
DO_Gripper_Close := 1; ! 关闭夹具
ENDIF
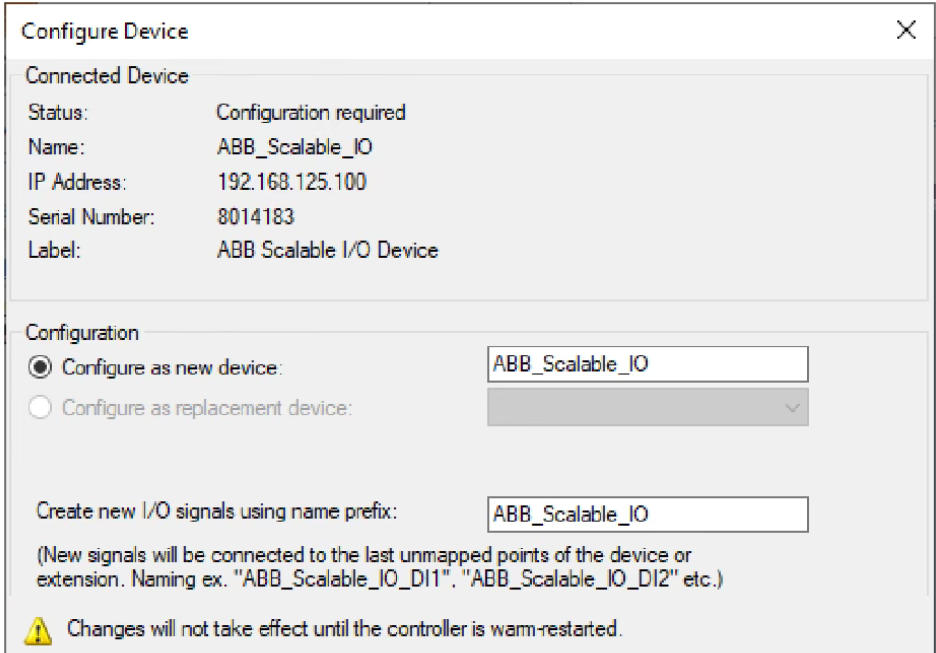
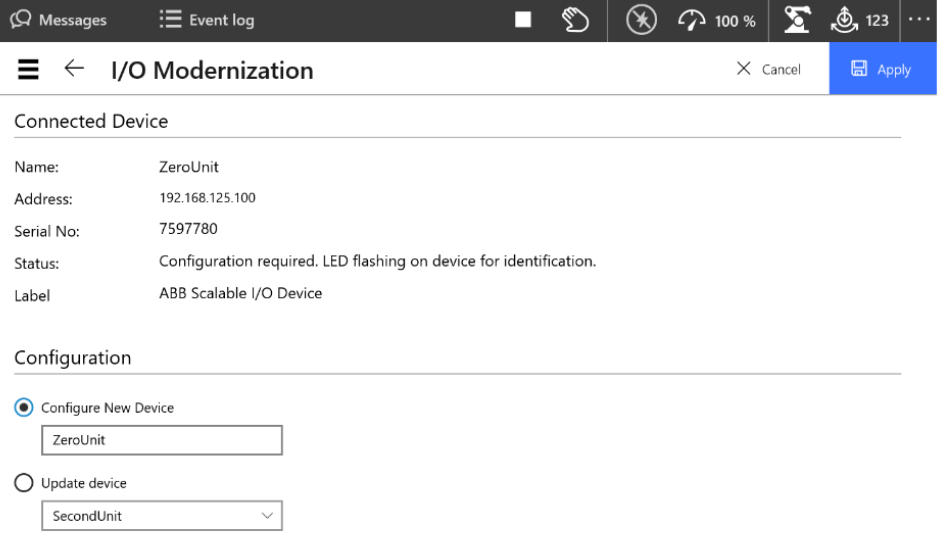
总线地址设置:若模块支持手动设置地址(如拨码开关),需确保与控制器扫描到的地址一致,避免冲突。
安全 I/O 配置:若使用安全模块(如用于急停、安全门),需在 “SafeMove” 配置中关联安全信号,并通过安全认证。
固件更新:定期通过 ABB RobotStudio 软件更新模块固件,确保兼容性和稳定性。