


50296的故障,如果没有搞清楚故障原因,处理起来可能会乱套,问题会越来越严重。这篇文章就做下这个问题的解析。
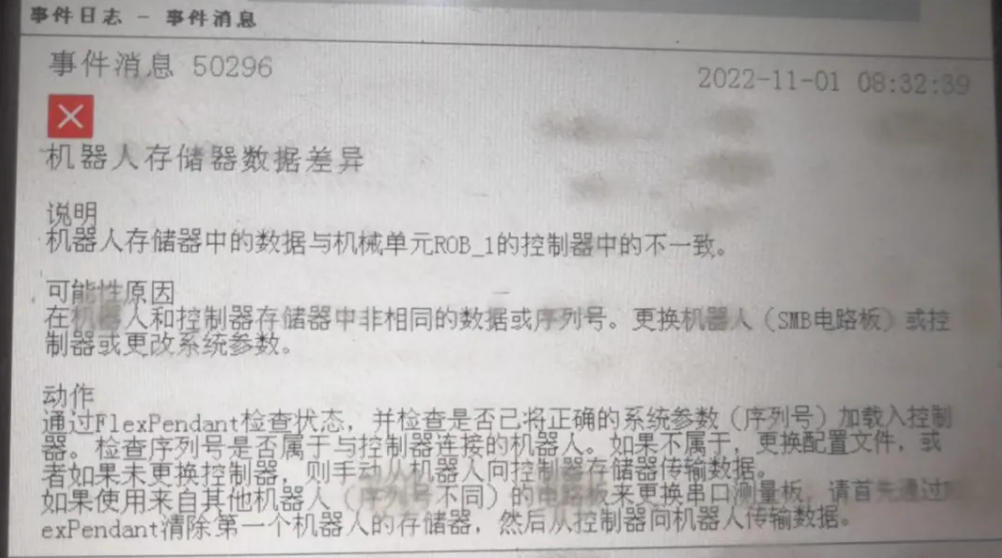
首先分析下出现50296故障的原因:
1. 跟别的机器人对换了SMB板
2. 当前的机器人坏了,更换了一台新的机器人
3. 机器人示教器上,手动修改了电机偏移值
4. 恢复了之前的备份(就是恢复了机械维修-更换电机之前的备份)
5. 恢复了其它机器人的备份
基本上都是上面的原因引起的,如再有其它原因再做分析。数据更新的原则是,先确认哪里存储的数据是正确的,再做相应的更新。
序号 | 故障原因 | 数据分析 | 正确数据 | 具体操作步骤 |
1 | 跟别的机器人对换了SMB板 | SMB板中的数据是其它机器人的,是不正确的 | 控制器中的数据正确 | 高级-清除机械手存储器 更新-替换SMB电路板 |
2 | 当前的机器人坏了,更换了一台新的机器人 | 机器人发生变化,新机器人和自带的SMB是一起的。 | SMB板中的数据 | 高级-清除控制器存储器 更新-已交换控制器和机械手 |
3 | 机器人示教器上,手动修改了电机偏移值 | 将控制器中的数据修改了 | SMB板中的数据 | 高级-清除控制器存储器 更新-已交换控制器和机械手 |
4 | 恢复了之前的备份(就是恢复了机械维修-更换电机之前的备份) | 之前备份中的数据不对,恢复到控制柜中,造成控制器中的数据是错误的 | SMB板中的数据 | 高级-清除控制器存储器 更新-已交换控制器和机械手 |
5 | 恢复了其它机器人的备份 | 恢复错误的备份,造成控制器中的数据是错误的 | SMB板中的数据 | 高级-清除控制器存储器 更新-已交换控制器和机械手 |
更新机器人存储器数据的路径如下:
ABB菜单---校准—选择需要更新的机械单元—手动方法(高级)--机械手存储器;
机械手存储器---菜单:

机械手存储器—显示状态(下图是虚拟示教器的状态,真实的会有实际信息):

机械手存储器-更新:

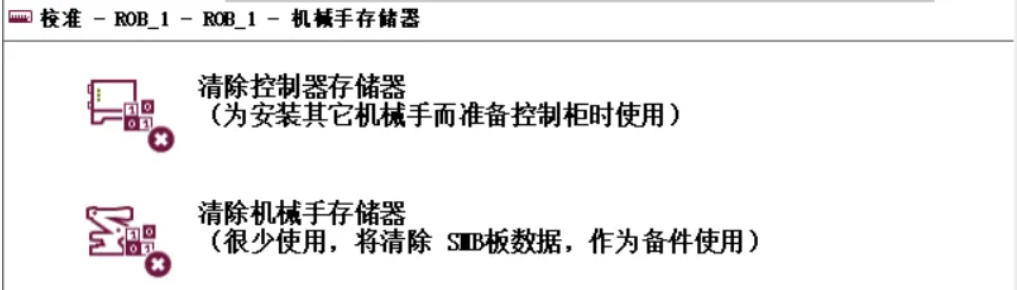
机械手存储器-高级:
很多人习惯手动编辑机器人电机偏移值,不建议大家这么操作,会造成数据更改不彻底,特别是有绝对精度的机器人更容易错误,选择上面所述的方式进行更新。
