本文参考:September 2025 – R25A
RobotWare Version: 6.08.00.00
IPS Version: 4.60.15.6
应用:保险杠喷涂
本文主要根据一个保险杠喷涂的程序来解析说明,一个产品的程序模块,范例如下:
MODULE M5(M5模块的名字)
! Robtarget 机器人喷涂的轨迹位置
LOCAL ConST robtarget p10:=[[634.1,255.8,1222.02],[0.693652,0.720116,0.0143664,-0.008629],[0,1,-1,-1],[9E+009,9E+009,9E+009,9E+009,9E+009,343.027]];
省略部分……
LOCAL ConST robtarget p460:=[[-253.3,111.59,1122.04],[0.693651,0.720116,0.0143705,-0.00862428],[0,1,-1,-1],[9E+009,9E+009,9E+009,9E+009,9E+009,343.027]];
PROC MainM5()
MoveAbsJ jHomePos,vPaint600,fine,tUserTool0; 机器人移动到home位置
WaitWObj wobjtrack\RelDist:=300; 等待输送跟踪功能的产品超过Start Windos 300mm,执行程序
ClkReset clock1; 计时时钟复位
ClkStart clock1; 计时始终启动
AccSet 100,100; 加速度相关参数设置到100%,最大值
!P42/L
PaintL p10,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
PaintL p20,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
SetBrush 3\Z:=1157; 执行接下来的PaintL指令,确认通过Z=1157时使用3号刷子表的参数
PaintL p30,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
PaintL p40,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
省略部分喷涂轨迹……
PaintL p430,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
SetBrush 2\Z:=3005;
PaintL p440,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
SetBrush 1\Z:=2088;
PaintL p450,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
PaintL p460,vPaint600,zPaint50,tRB1000SAD_250\WObj:=wobjtrack;
MoveAbsJ jHomePos,vPaint500,fine,tUserTool0; 喷涂完成后,移动到home位置
DropWObj wobjtrack; 丢掉输送跟踪的产品
clkStop clock1; 计时始终停止
TPWrite " Last Cycle Time : "\Num:=ClkRead(clock1);写屏指令,将产品喷涂的时间显示在屏幕上
ENDPROC
ENDMODULE
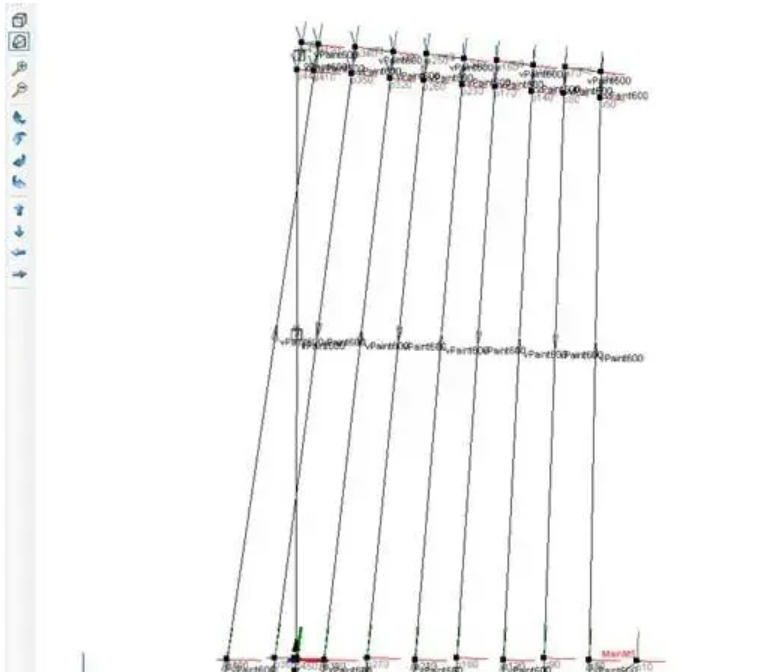
软件ShopFloorEditor中显示的轨迹图形如下: