1. ABB机器人支持直线输送链跟踪
大体跟踪原理如下:
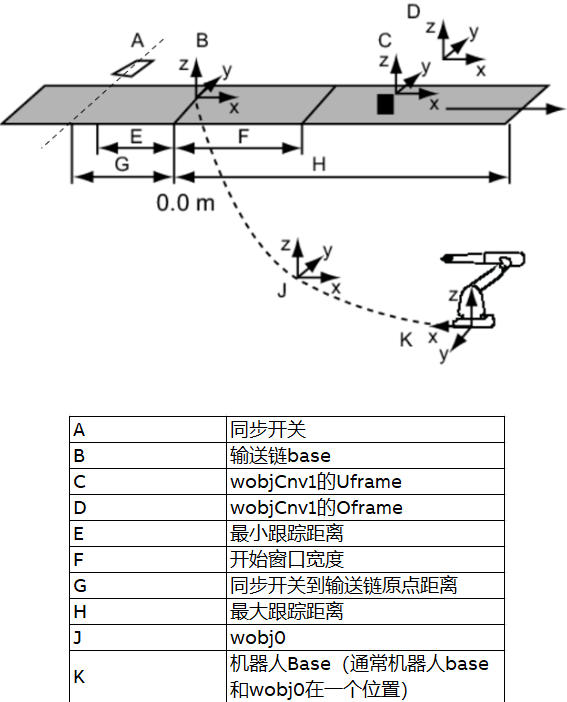
1) 产品经过同步开关A,触发信号。(G是同步开关到输送链原点的距离)
2) 产品经过B(输送链0.0m)进入F(开始窗口)区域,机器人空闲,机器人执行跟踪动作
3) H是最大跟踪距离,E是最小跟踪距离(理论输送链反转,可以反着跟)
4) C是wobjCNV1的Uframe,在产品经过B后,被输送链驱动
5) D是wobjCNV1的oframe(相对于wobjCNV1的Uframe)
countsPerMeter标定:
使用输送链跟踪,首先需要测量countsPerMeter参数(输送链行进1m,编码器变化数量)
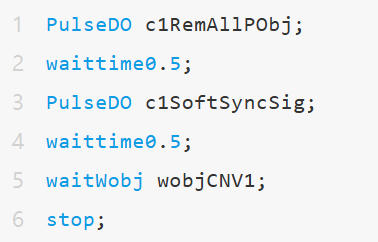
1. 运行以下代码,激活输送链。
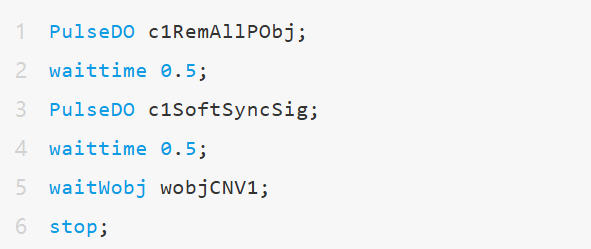
2. 启动输送链,查看示教器示数是否增加(没有增加或者减小,修改编码器AB相接线),然后停止输送链。
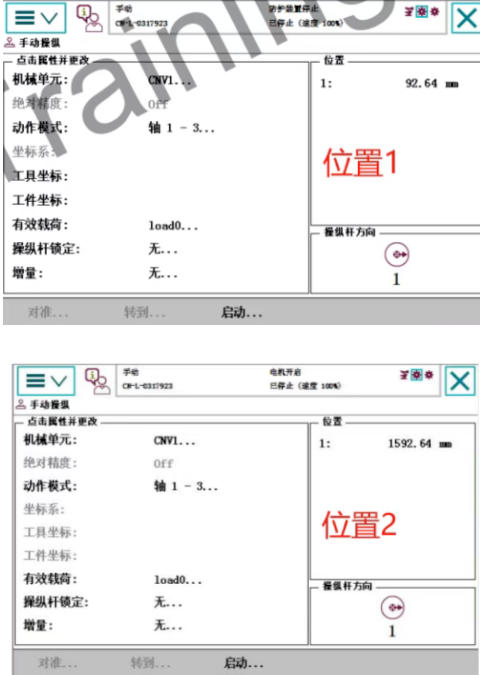
3. 在输送链上放置一个物体(如下图1),并在输送链边沿做好标记。记录此时示教器显示的输送链位置1.
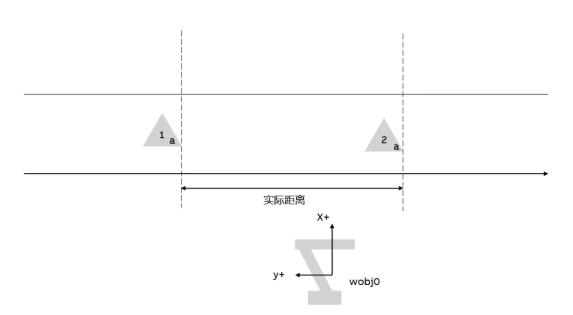
4. 继续启动输送链,移动物体至少1m以上并停止。记录此时示教器显示位置2,并测量实际物体移动距离
输送链原点标定:
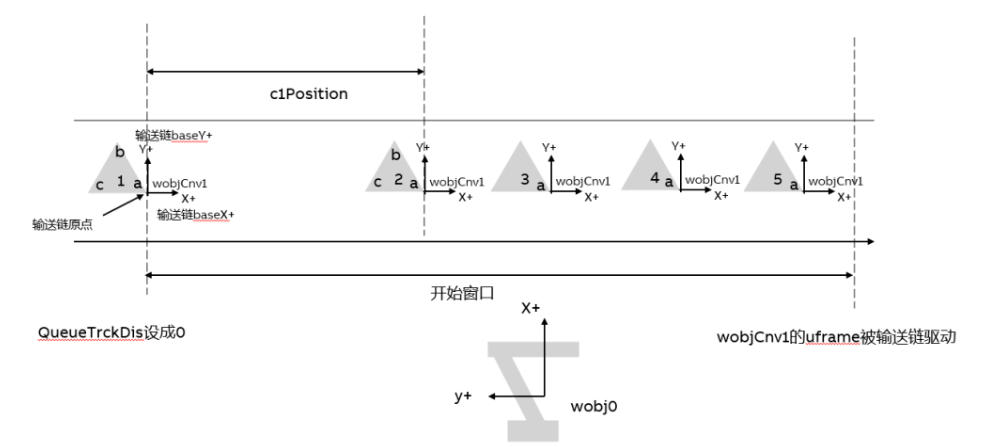
0. 建议将配置参数中的QueueTrckDis 设成0 .
1. 制作一个准确的TCP,并使用TCP作为当前工具
2. 将产品特征放置在希望作为输送链原点的位置,例如下图的位置1(特征为a)
3. 运行以下代码:
4. 移动物体到下图的位置2,进入示教器 - 校准- CNV1。移动工具TCP到特征a,记录位置1.
5. 开动输送链,移动物体到位置3,移动工具TCP到特征a,在校准-CNV1里记录位置2,
开动输送链,移动物体到位置4,移动工具TCP到特征a,在校准-CNV1里记录位置3,
开动输送链,移动物体到位置5,移动工具TCP到特征a,在校准-CNV1里记录位置4。
完成输送链原点标定。
6. 系统会根据示教的4个点,以及位置2时的输送链位置数据,自动计算出输送链原点在下图的位置1的a。输送链前进方向为输送链base的X方向。
当产品经过输送链原点后wobjCnv1的uframe就会沿着输送链的X+方向移动。