1. 机器人安装在导轨上,可以实现导轨与机器人的联动(例如导轨移动,同时机器人6个轴也移动,但是机器人末端针尖TCP不动)。
2. 联动要准确,除了导轨减速比设置要准确,机器人TCP准确,机器人base与导轨的关系也非常重要。
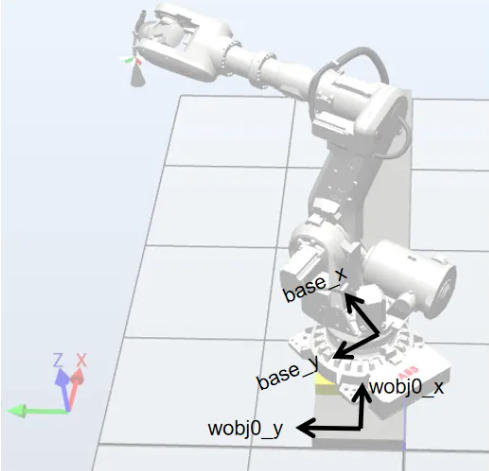
3. 通常,机器人安装在导轨上时,机器人的base的x与导轨的x方向(前进方向)一致。或者呈±90°关系。
4. 例如机器人如上图安装在导轨上,理论安装位置是与导轨呈45°。但实际由于安装偏差,夹角不是45°。 若在moc配置中设置夹角为45°,联动运动时机器人会有较大偏差。
以下假设,已经在机器人配置-moc-robot中设置了机器人base的角度为45°(转为四元数)
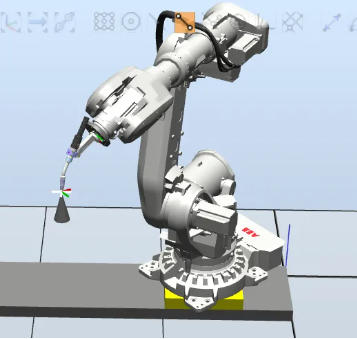
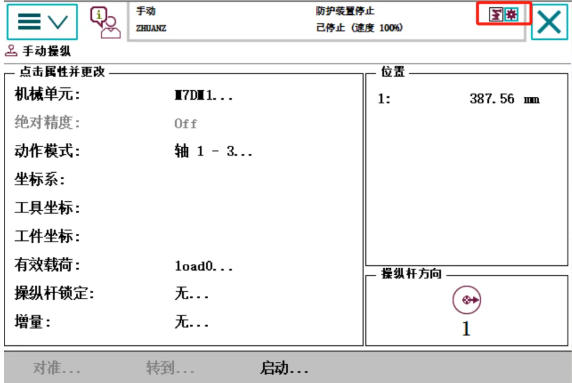
5. 移动导轨和机器人,使得TCP对准空间固定针尖(位置1)。如下图。
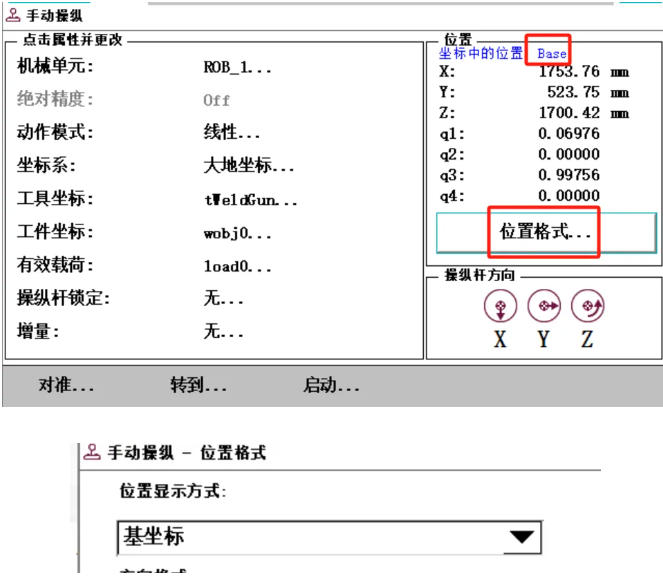
点击示教器的位置格式,选择“基坐标”,即要获取此时TCP在机器人base下的xyz值。 把这个xyz值手动输入到下方代码的pos10_inbase 赋值语句中。
6. 此时jog界面,坐标系选择“大地”,并切换到外轴,移动导轨。理论上TCP不会动,但是由于机器人base与导轨关系偏差,TCP会移动。
7. jog界面,坐标系选择“base”(仅平移机器人,导轨不动)。让TCP再次对准固定针尖。
8. 参考步骤5,记录此时机器人TCP在base下的值pos20_inbase,手动输入到以下代码。
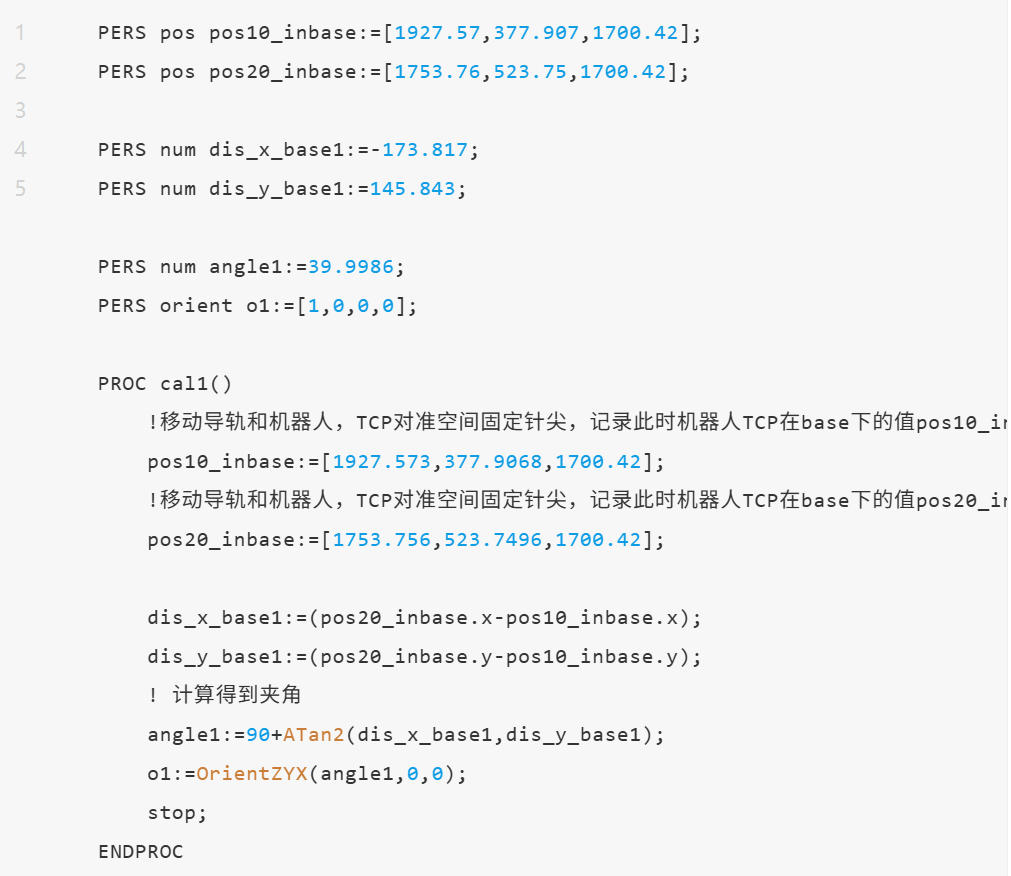
9. 运行以下代码,计算得到机器人base与wobj0的x的角度和相关四元数,填入moc的robot的base即可。