


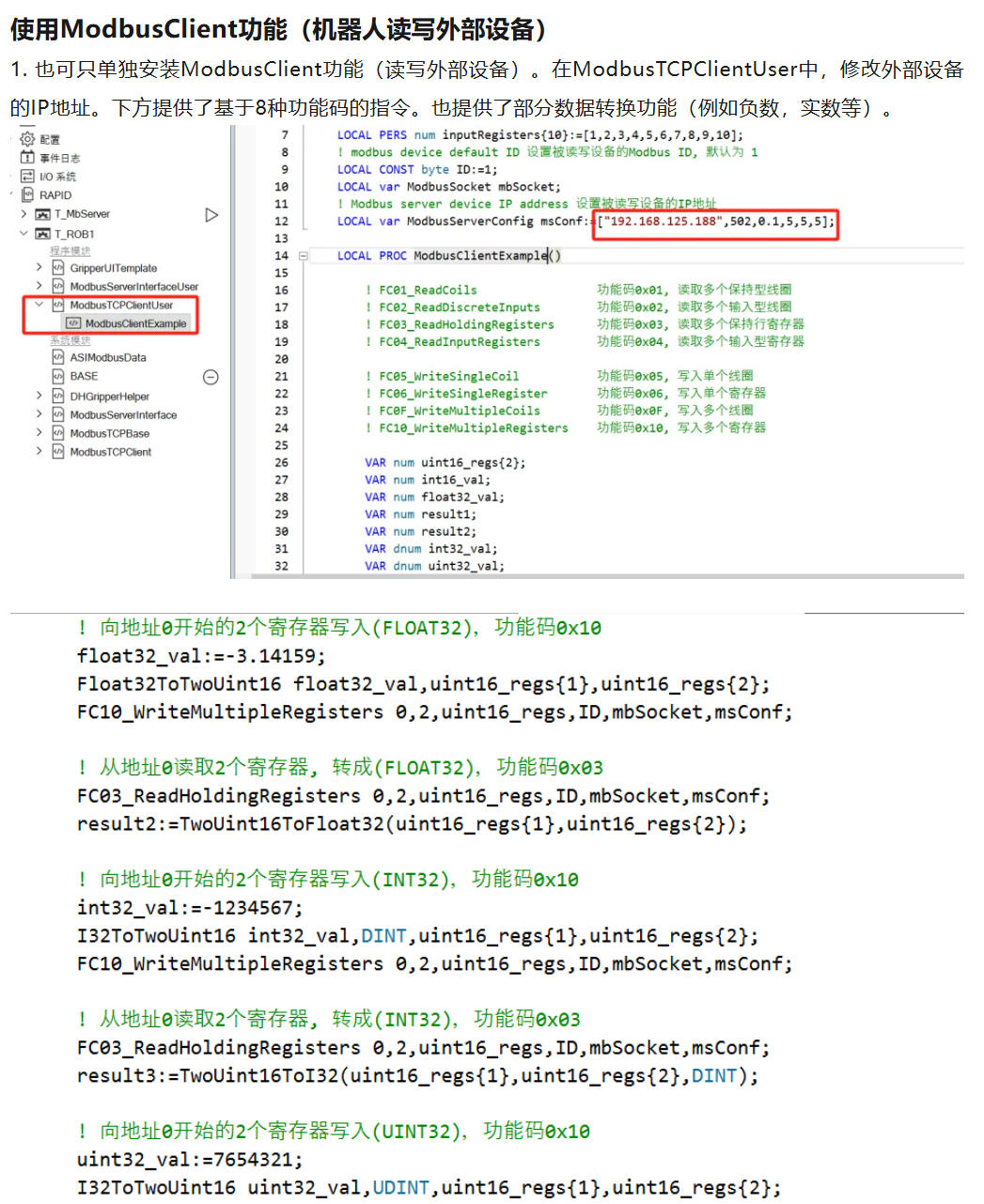
ABB官方提供了ModbusTCP插件,而且免费!!!!直接在robotstudio里下载即可。
插件针对Omnicore系统,但所有代码基于RAPID编写并且开源(安装到机器人系统后可以看到所有代码)。用户可以稍作修改也应用到IRC5上(主要是配置文件略有不同)
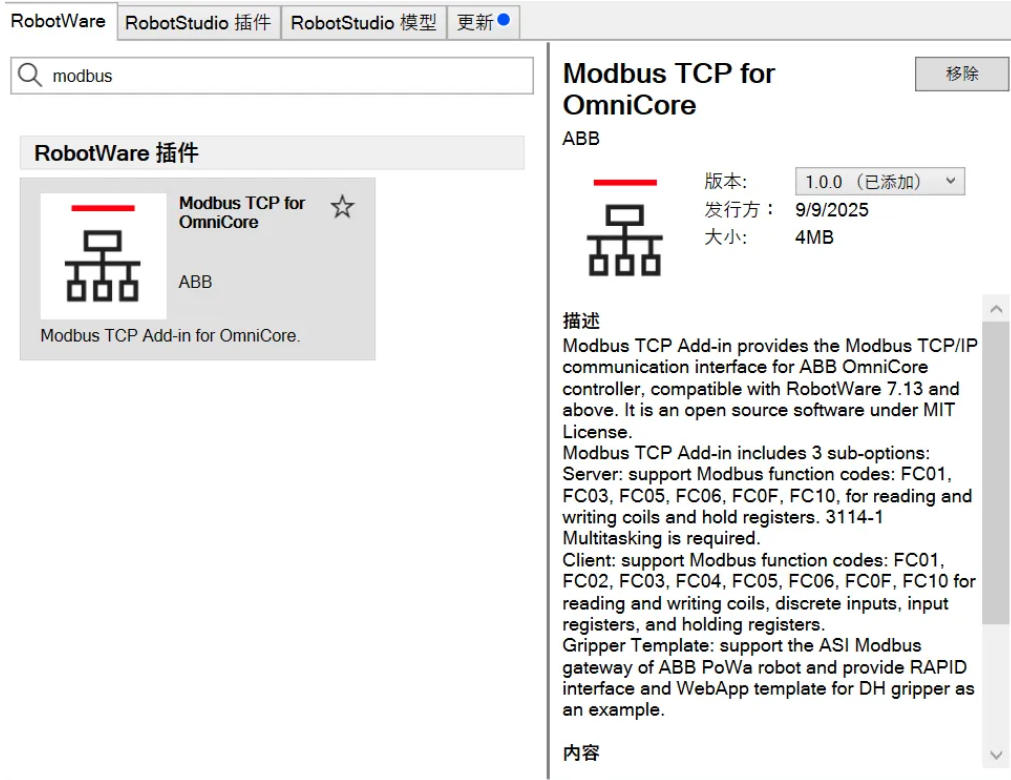
Modbus TCP Add-in 是一款为ABB 工业机器人提供Modbus TCP/IP 通讯开发的插件,需要运行在OmniCore 控制柜和 RobotWare 7.13 及以上版本。它的源代码遵循MIT 开源许可证,用户可以自由地使用、修改、分发和商业化。
该插件提供Modbus TCP 服务器(Server)、客户端(Client) 和专为DH 夹爪定制的模板(Gripper Template),支持标准Modbus TCP/IP 协议 V1.1b3 。
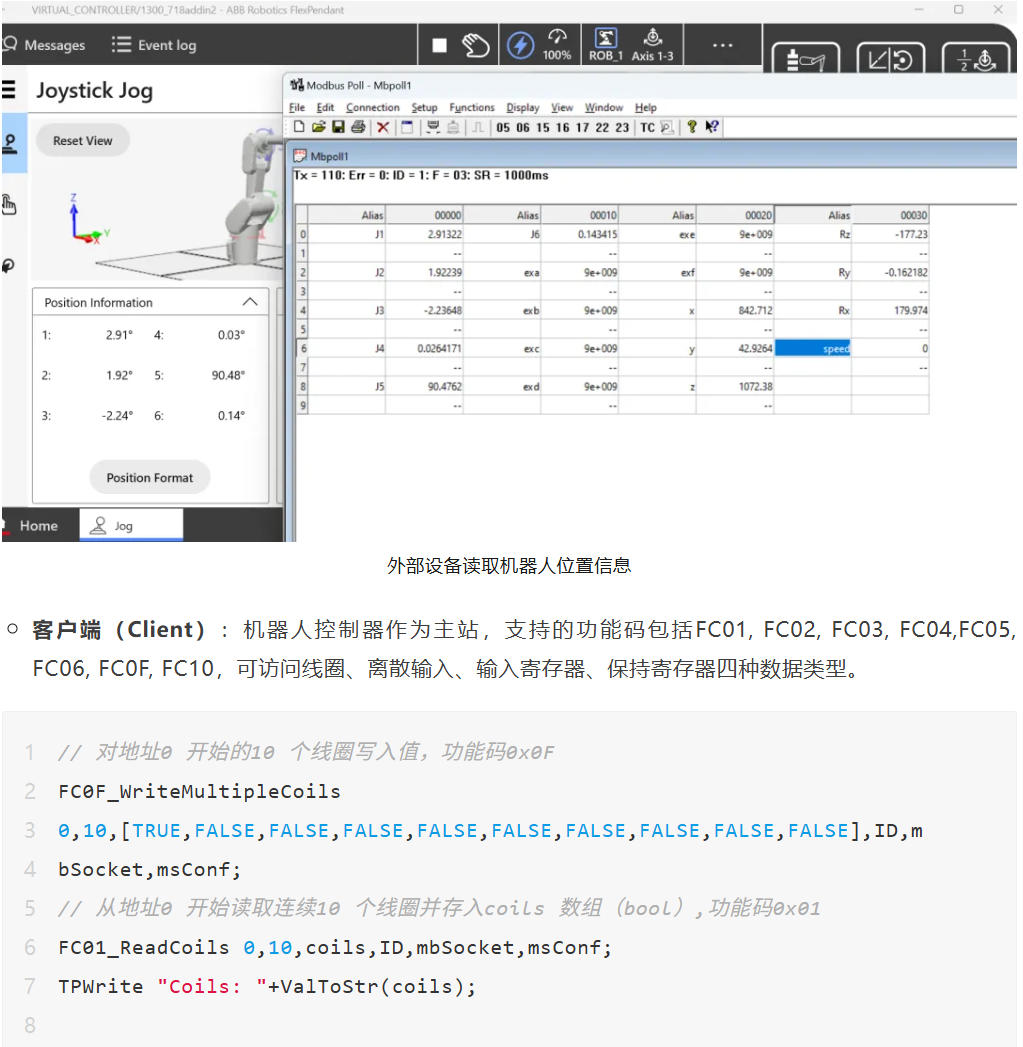
服务器(Server):机器人控制器作为从站,支持功能码FC01, FC03, FC05, FC06, FC0F,FC10,外部设备(PLC)可读写机器人线圈与保持寄存器,机器人位置信息状态等。
夹爪模板(Gripper Template):以大寰 夹爪为例,支持ABB PoWa 机器人ASI 通信接口,附带Web 控制界面模板。生态系统用户在以此模板基础上,可以集成开发专属末端工具软件接口。
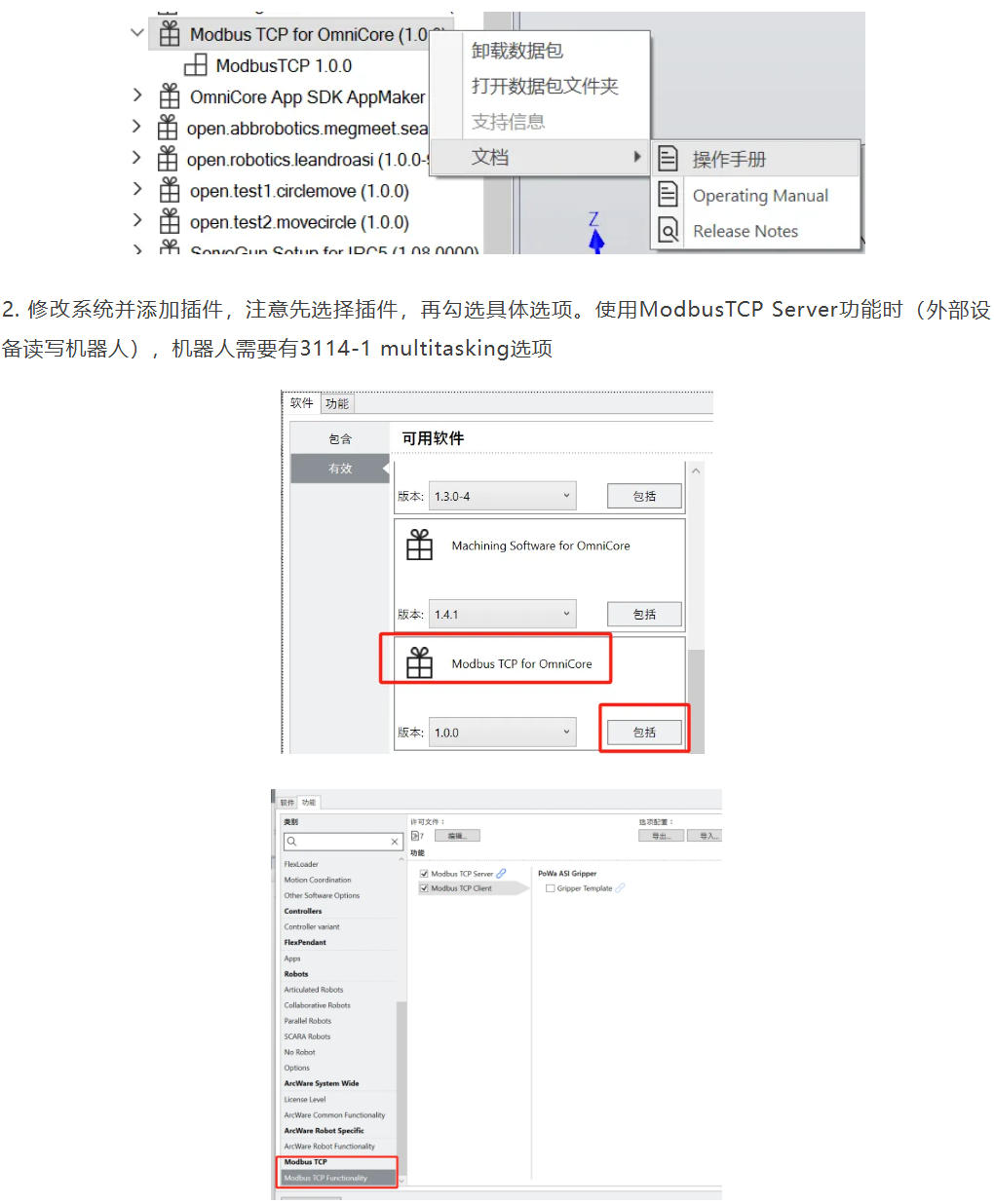
1. 在robotstudio的addin下载后,在RobotWare插件里可以看到下图。插件有详细的中文配置和使用文档。
使用ModbusServer功能(外部plc等读取机器人)。
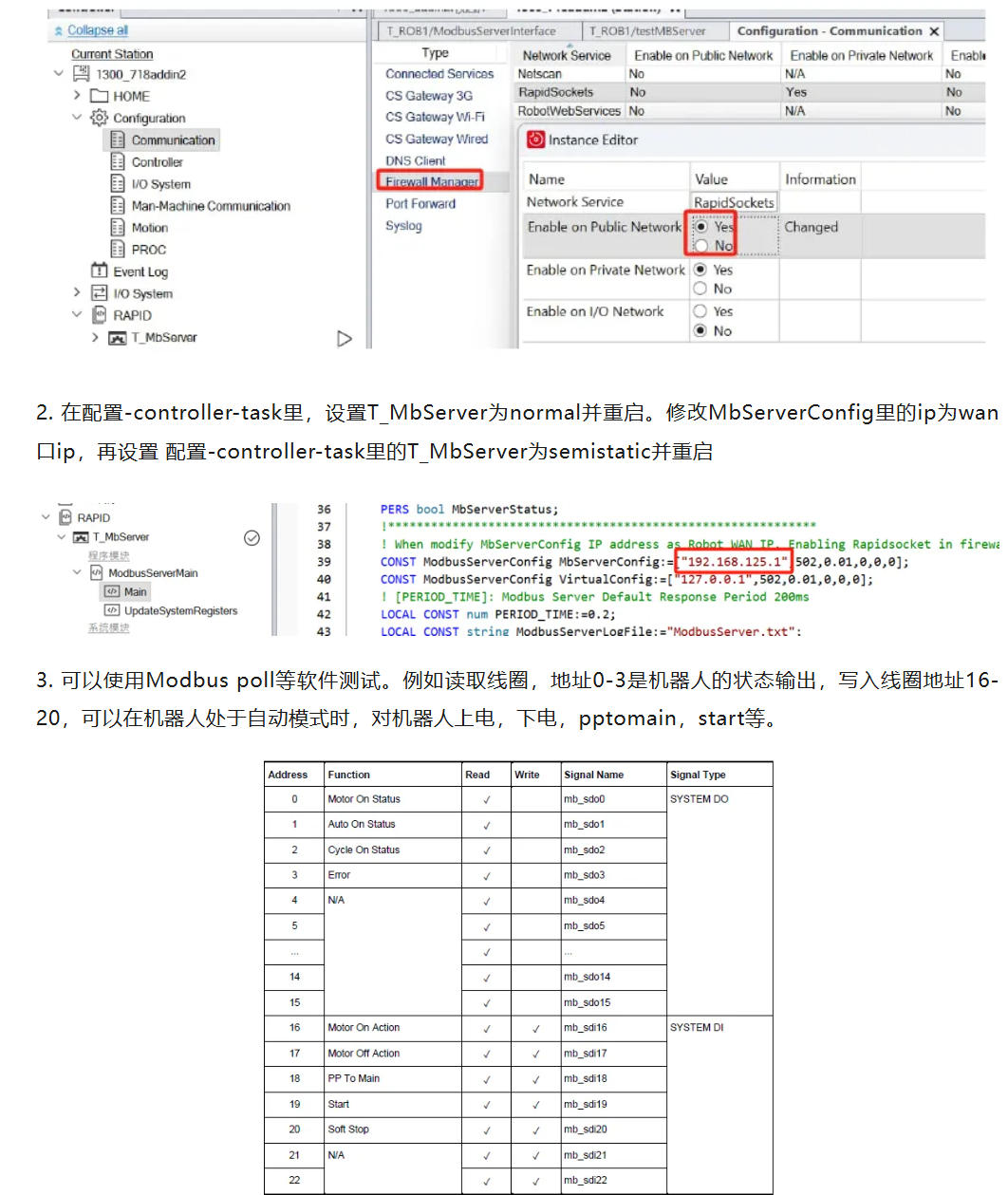
1. 仿真机器人默认为127.0.0.1:502,真机默认192.168.125.1:80(mgmt口)。如果要使用wan口,参考手册,先配置wan口,打开firewall。
5. 线圈地址32-95对应机器人的mb_do32~95(机器人可以直接setdo),modbus poll使用功能码0x01 读取。 mb_doXX 和 mb_diXX 都关联到了MB_Device虚拟设备上。
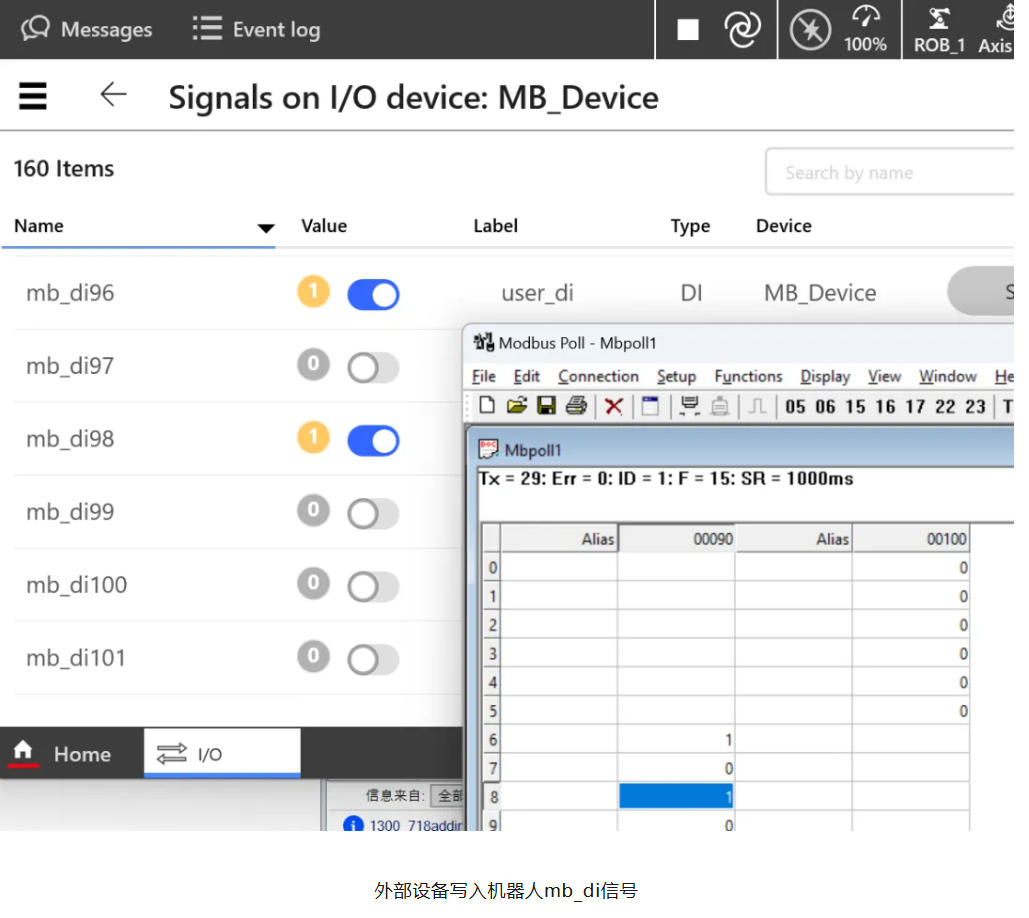
6. 线圈地址96-159对应机器人的mb_di96~159,modbus poll使用功能码0x0F 写入。
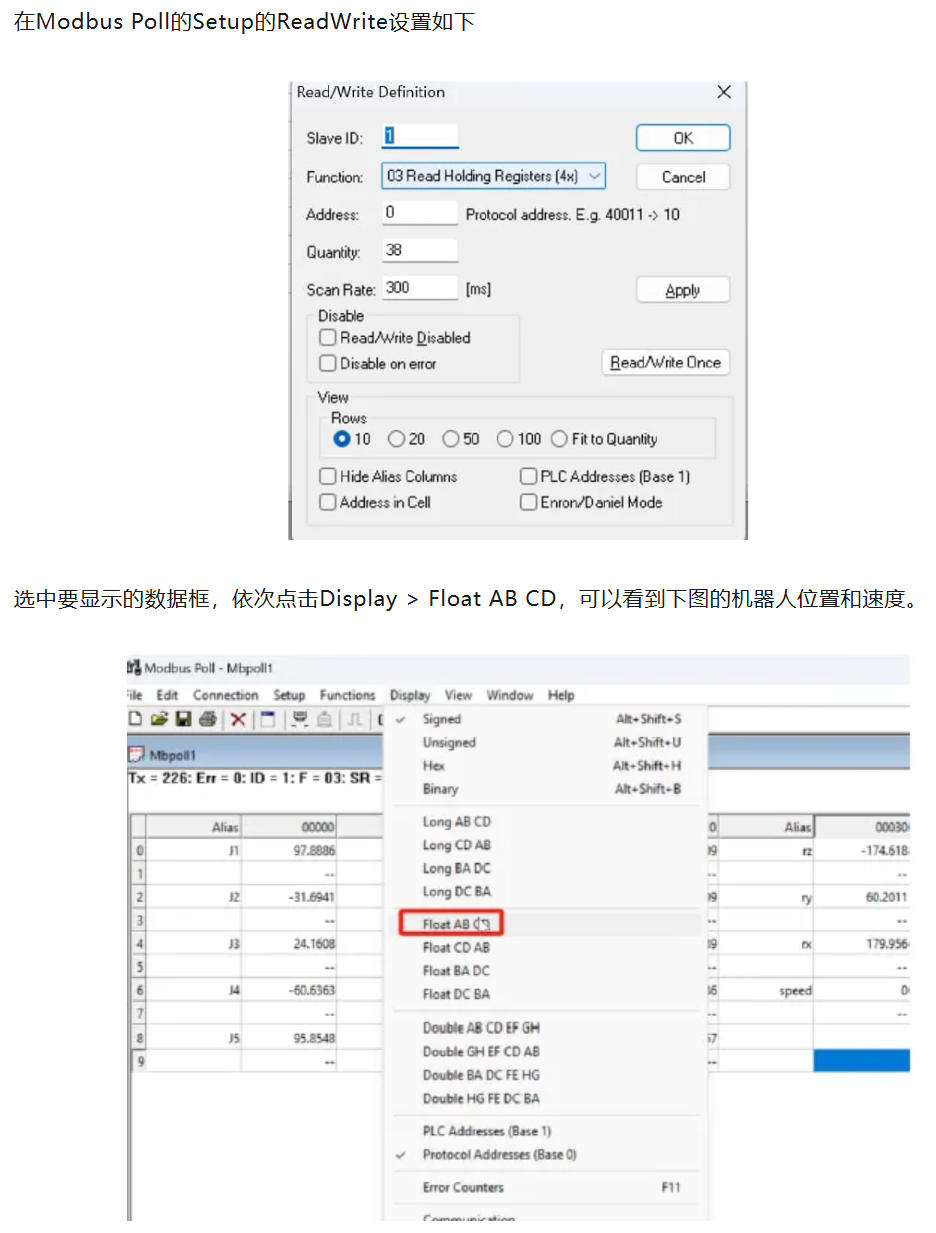
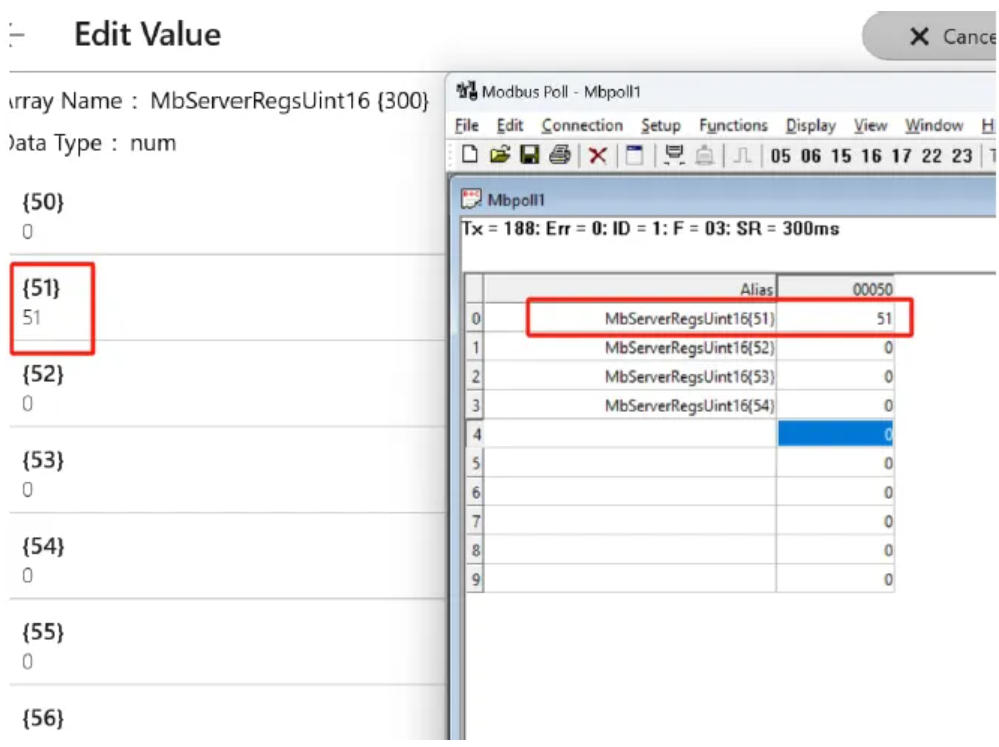
7. 机器人对数组MbServerRegsUint16{51-150} 赋值,modbus poll 使用0x03功能码读取对应地址50-149的寄存器。
8. modbus poll 使用0x10功能码写入150-299的寄存器,机器人侧可以通过数组MbServerRegsUint16{151-300}获取值。
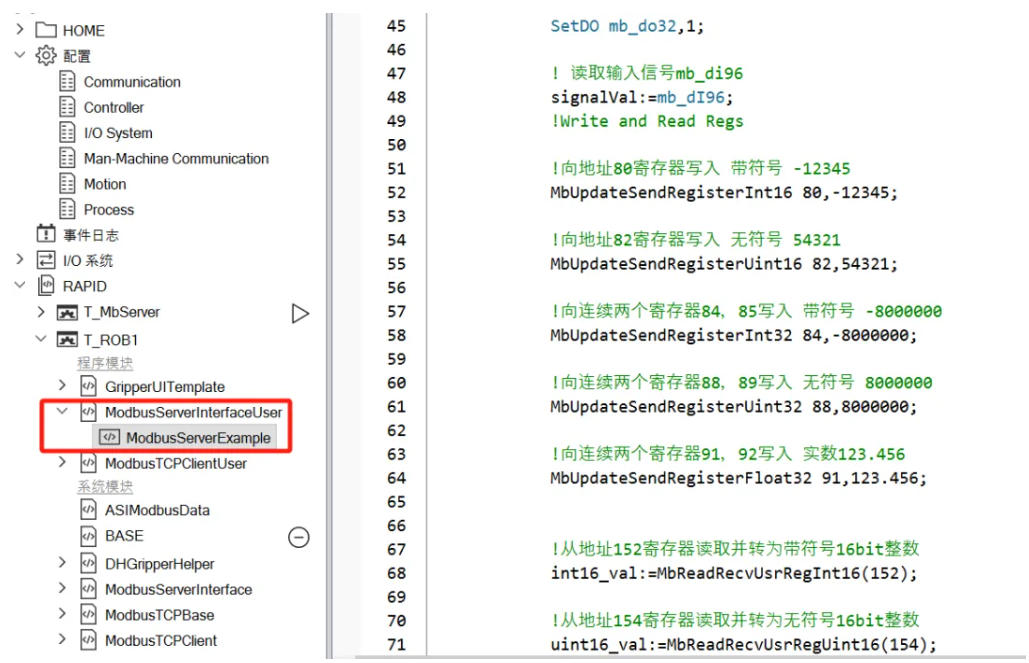
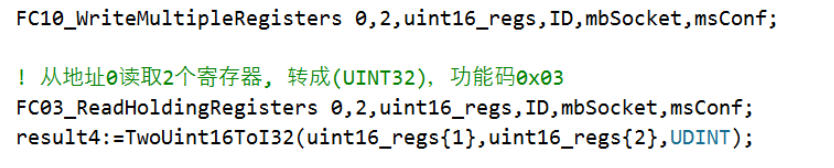
9. 在ModbusServerInterfaceUser里提供了处理负数,实数的功能指令。用户可以参考使用。
2. 现场若有ModbusRTU设备,也可以自行购买一个ModbusTCP转RTU的模块,使用以上代码对设备发送指令即可。
使用协作机器人Powa末端抓手ModbusRTU功能
1. Powa 末端ASI 内置一个Modbus TCP 转Modbus RTU 网关模块,该模块IP 地址:
192.168.125. 140。用户只需要使用Modbus/TCP Client 指令向该网关发送数据,该网关会自动转成Modbus/RTU 与夹爪设备通讯。
