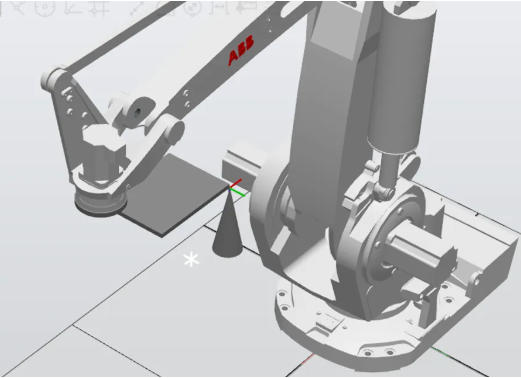
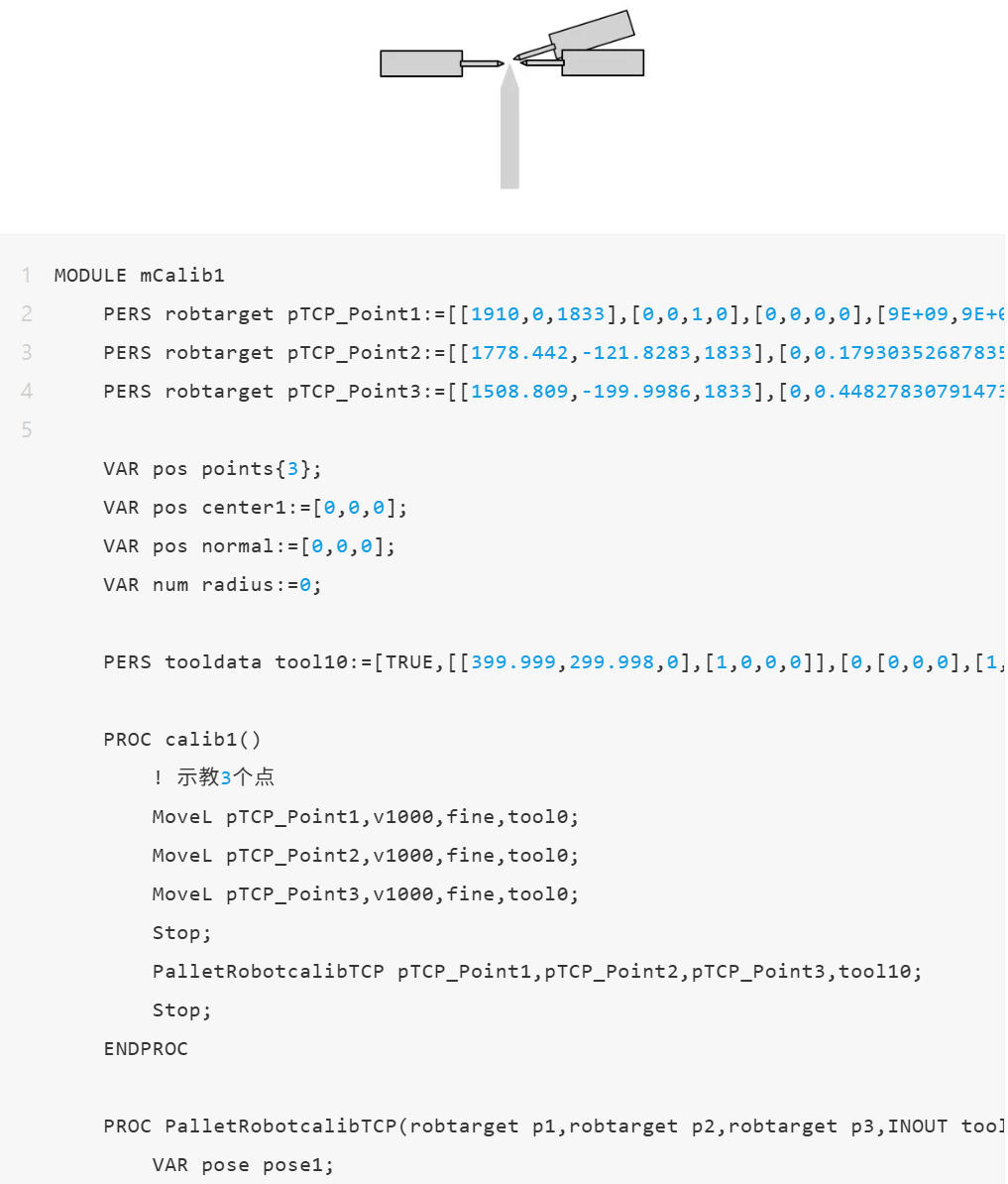
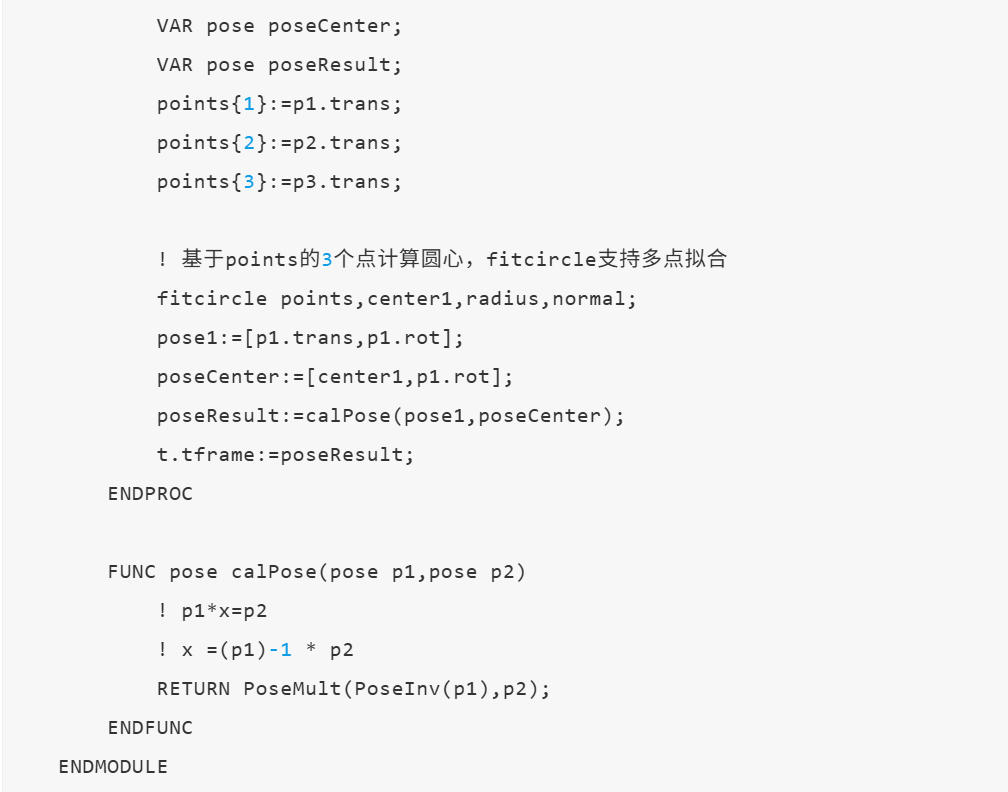
2. ABB机器人的TCP标定界面,暂时无法对4轴码垛机器人的TCP进行标定。3. 对于4轴码垛机器人,TCP数据只有x,y和Rz。 Z方向可以认为根据实际输入。4. 对于此类TCP,可以让机器人末端工具针尖,绕着固定点移动旋转,并记录3个点(3点求圆心,也可以多个点拟合圆心)。5. 参考下方代码计算:


 联系方式
联系方式