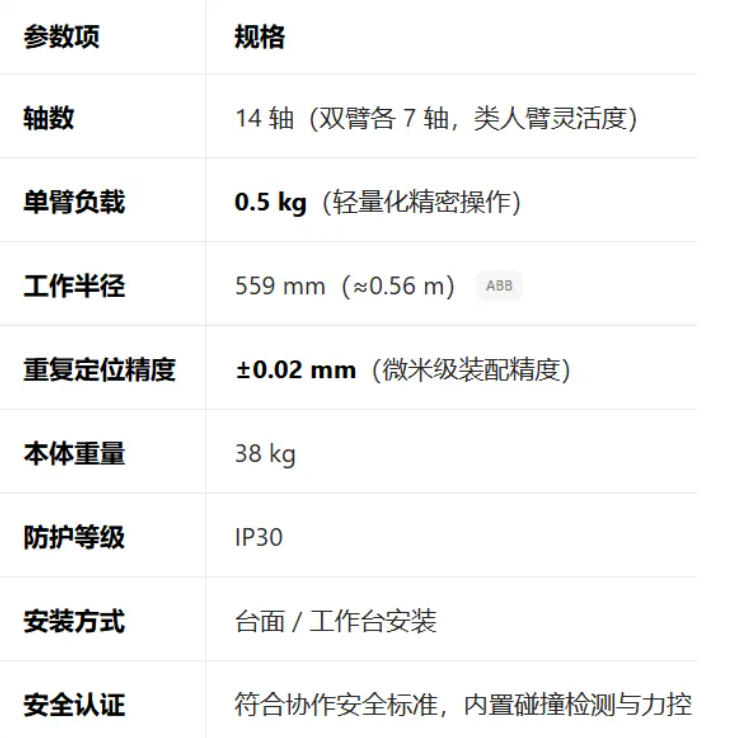
ABB的YuMi(IRB 14000)机器人是ABB集团在2015年推出的全球首款真正意义上的双臂协作机器人,其主要参数如下:
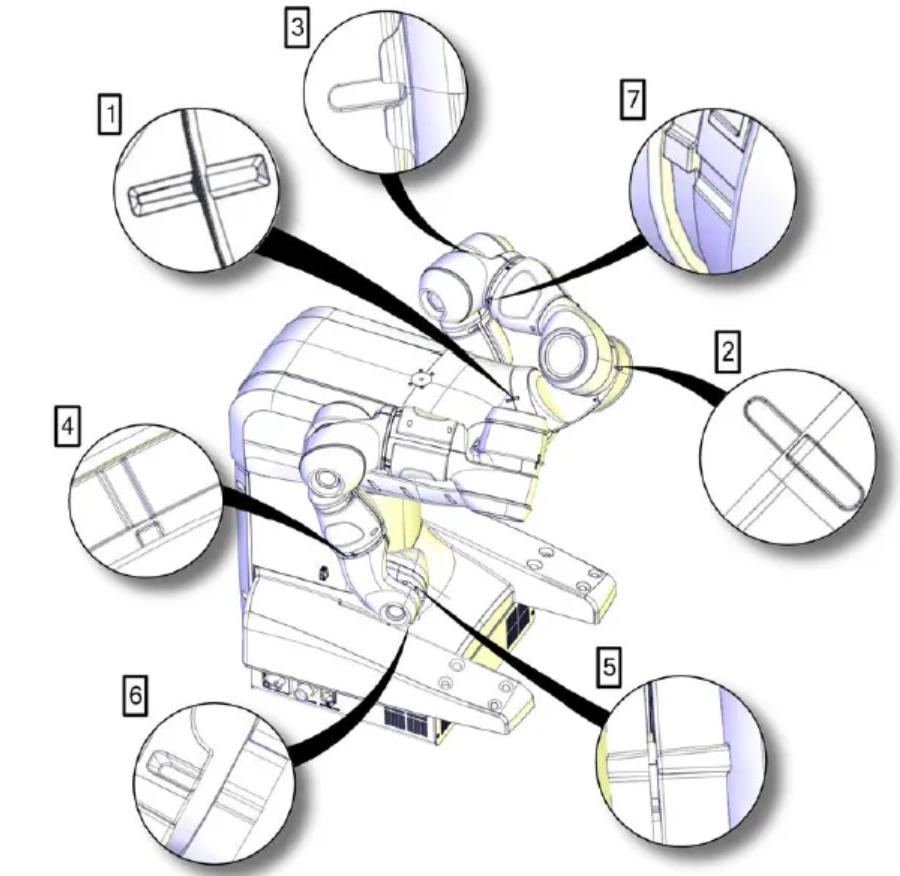
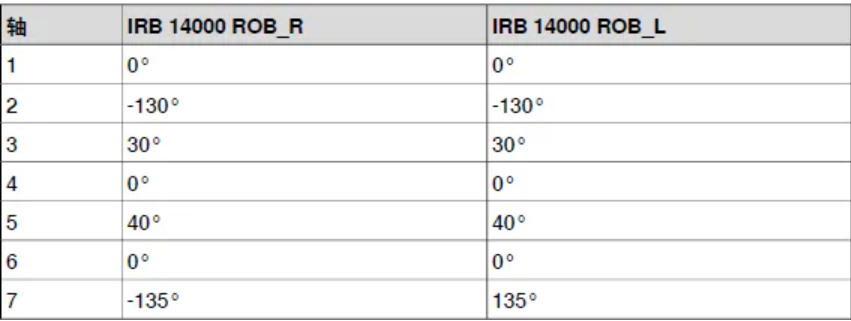
以角度表示的校准后精确轴位置如下:
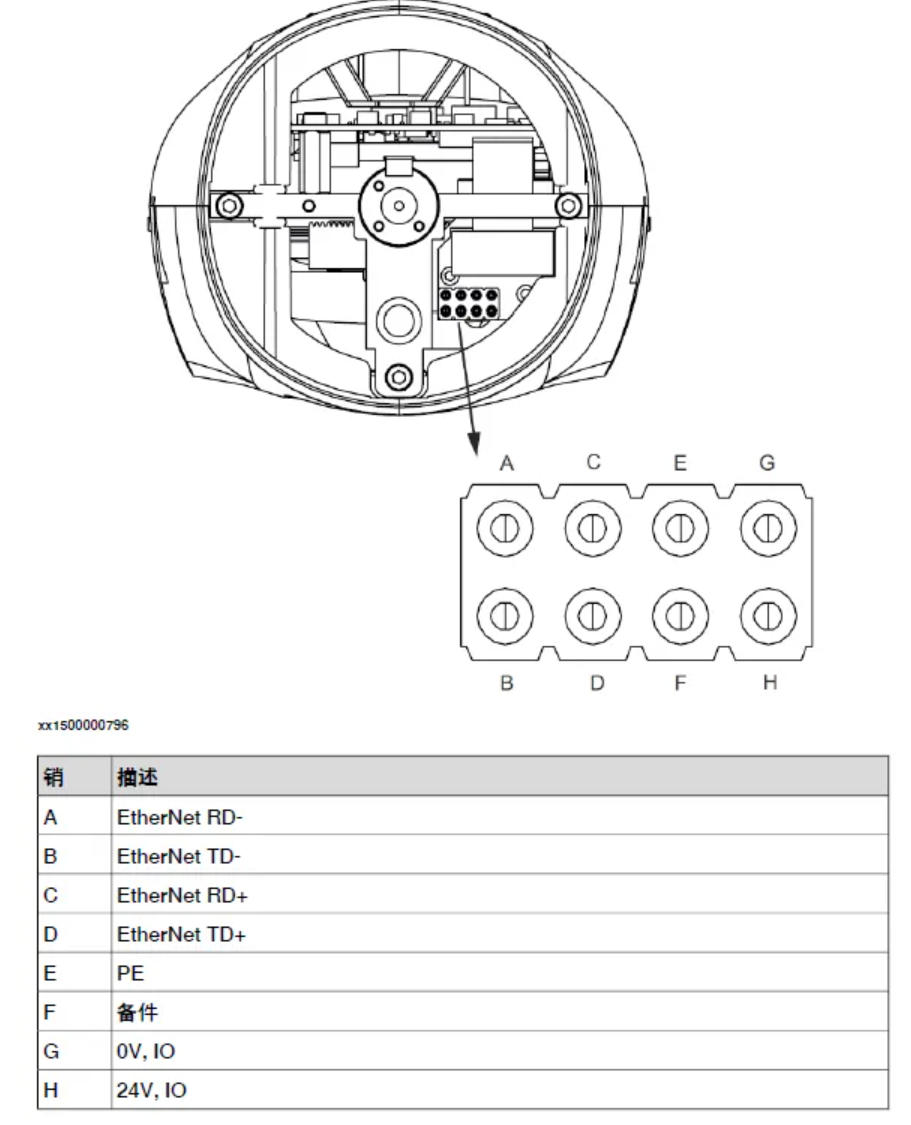
2.和外部PLC通讯的网口在左侧控制面板上,定义如下:
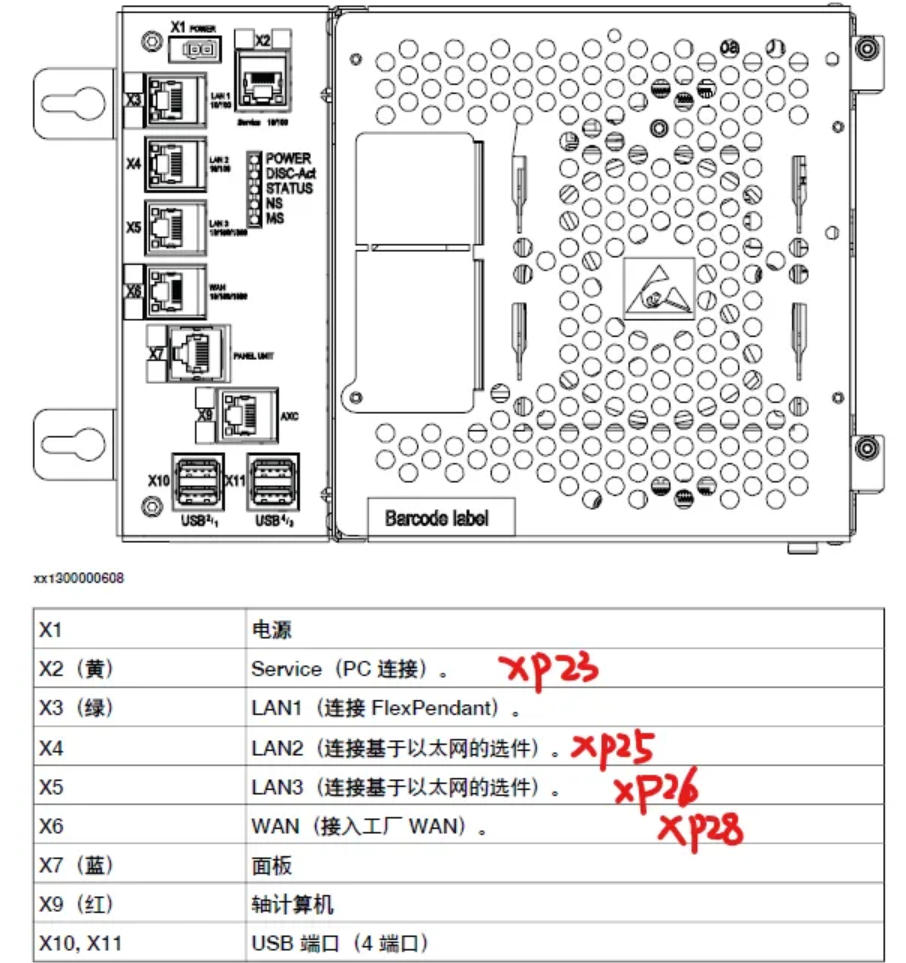
其对应到主机网口如下:
隔离LAN 3无法用于连接任何HMI设备(RobotStudio、Robot Web Services或PCSDK客户端),因为其不支持通信所需协议。
一般将LAN3口设为Profinet device或者EtherNet/IP adapter从站网口。
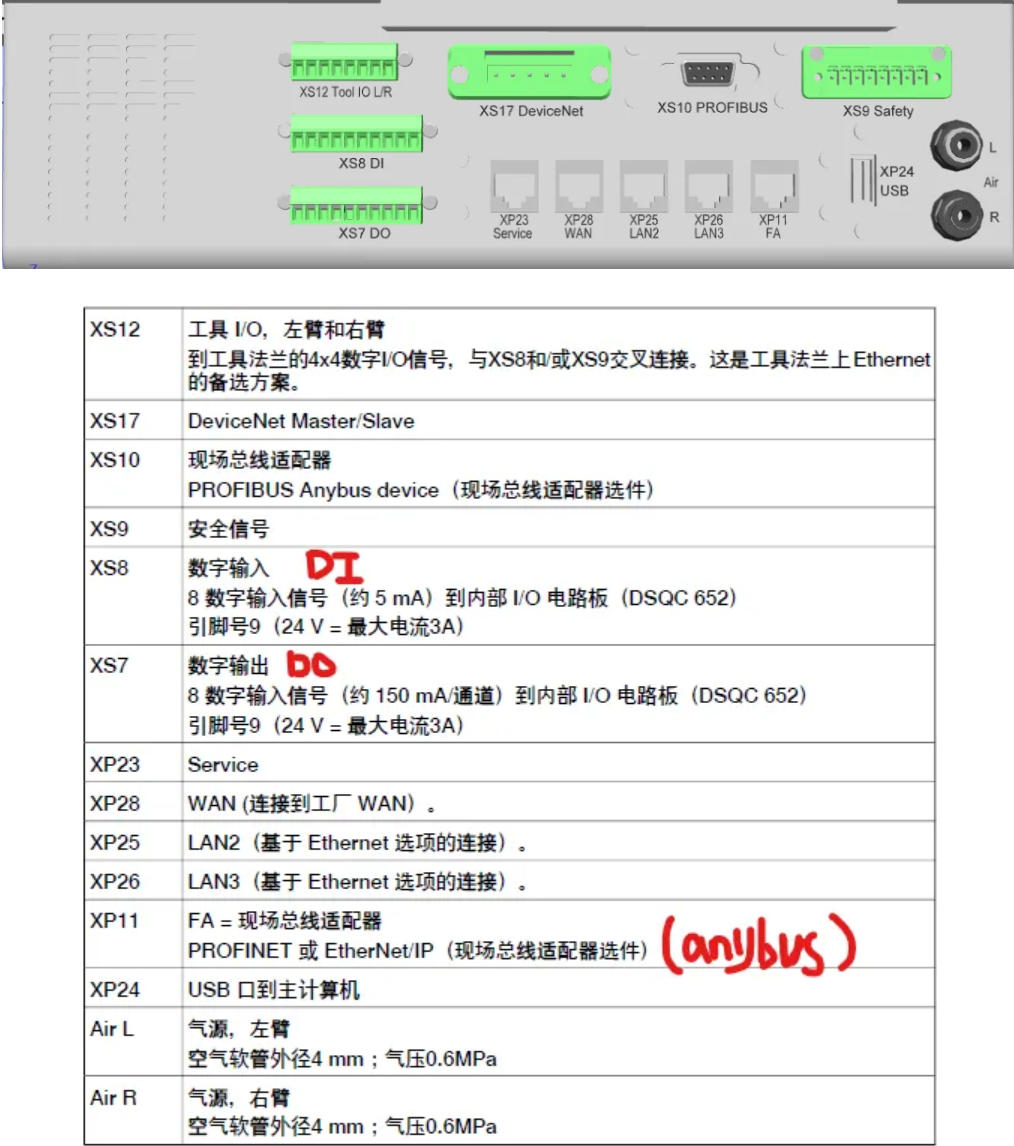
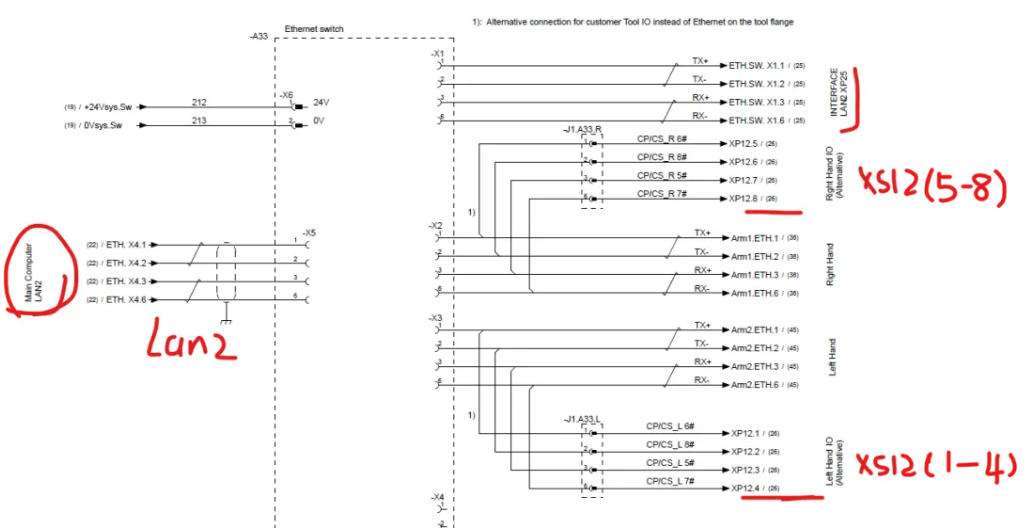
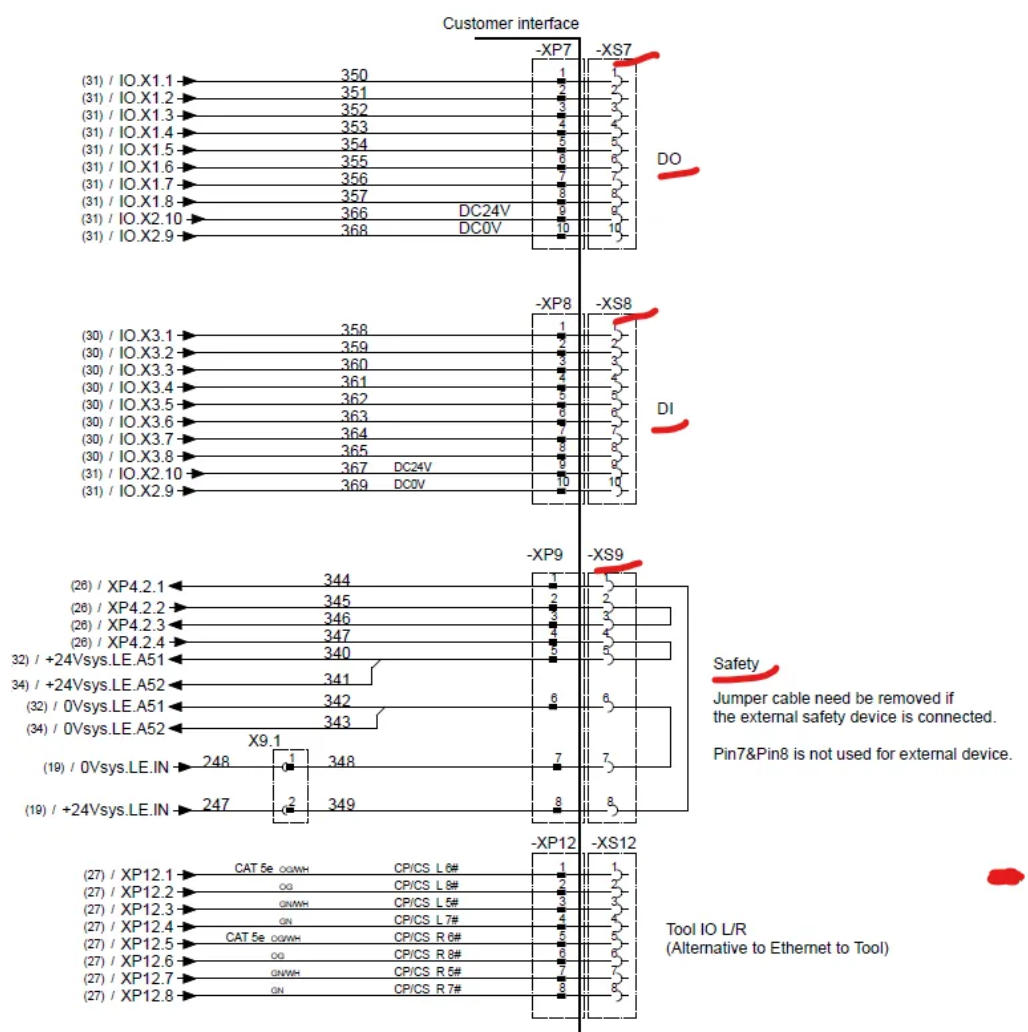
3.XS7/XS8/XS9/XS12的内部电路如下,现场可以按需接线:
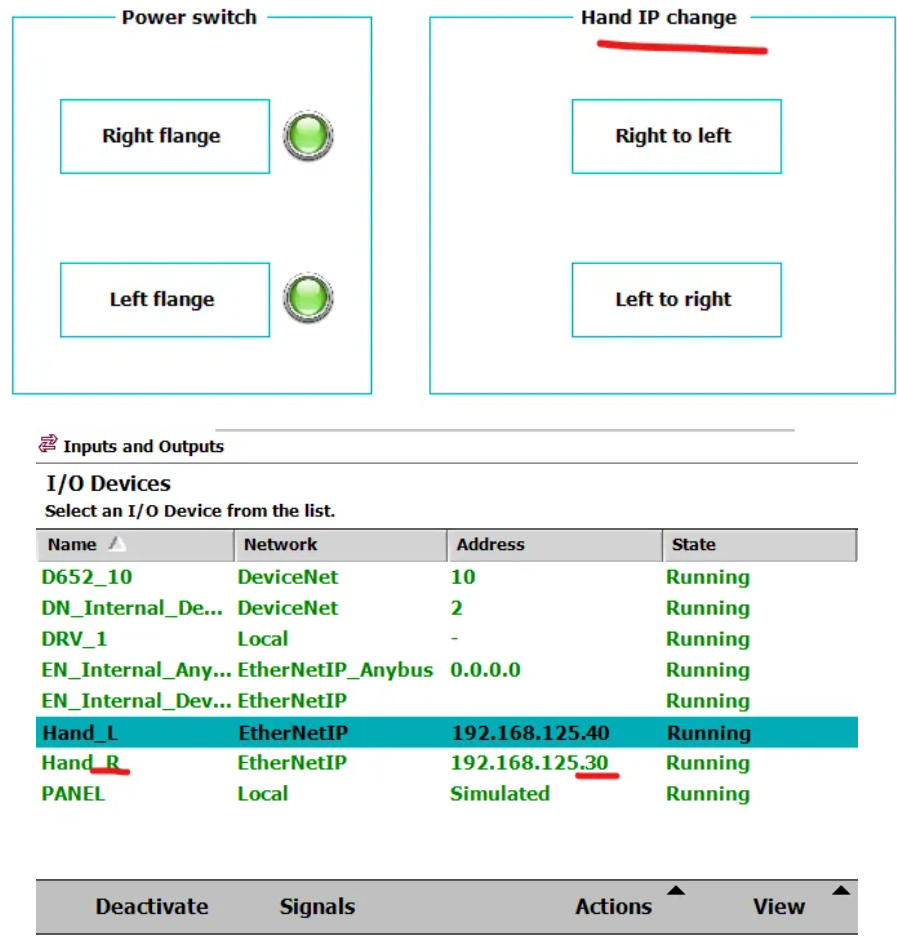
4.正确设置夹具的IP:
在机器人上首次安装夹具或更换夹具时,必须建立左右标识(手征)。手征由不同的IP 地址控制。对于右手和左手,其分别为192.168.125.30 和192.168.125.40。夹具只能使用这些IP 地址,夹具的默认IP 地址是192.168.125.30,即夹具作为右夹具交付给用户。
如果开机时左侧的夹具没有连接上,可以尝试更换下IP地址,如下:
有3个M2.5孔和一个导销用于将夹具安装到手臂工具法兰上,如下图:
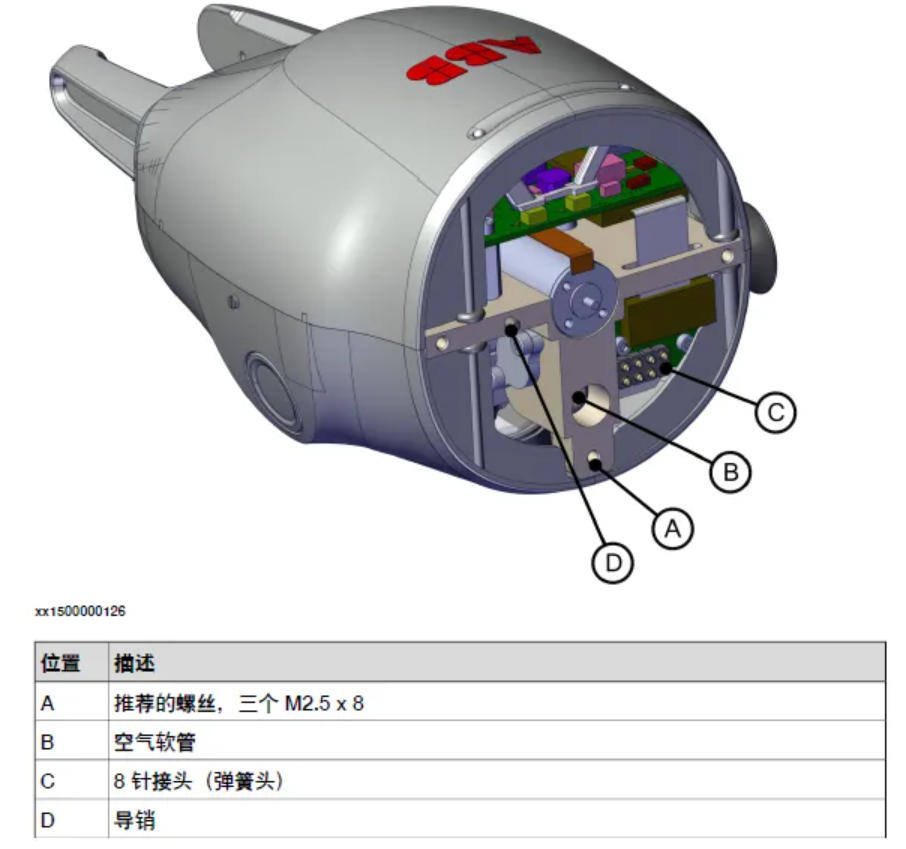
其中8pin接头定义如下: