


ABB 机器人与三菱 PLC 通讯,优先用Modbus TCP(以太网,免硬件);其次是CC‑link IE(三菱原生总线);或加Profinet↔CC‑link 网关实现跨协议互通。
一、主流通讯方案对比
Modbus TCP(最常用)
硬件:机器人 WAN/LAN 口 ↔ 三菱 PLC 以太网口(直连或交换机)。
软件:机器人需616‑1 PC Interface选项;PLC 内置以太网或 Modbus TCP 模块。
优点:免额外硬件、配置简单、通用稳定。
适用:中小数据量、快速集成场景。
CC‑link IE(三菱原生)
硬件:机器人装DSQC 378B(IRC5)或3066‑1/2(OmniCore)板卡 → 三菱 PLC CC‑link IE 口。
优点:实时性高、三菱体系原生支持。
适用:高速 I/O、运动控制、三菱主力产线。
Profinet↔CC‑link 网关(跨协议)
硬件:机器人 Profinet 口 → 网关(如赫优讯 NT50‑CC‑EN)→ 三菱 PLC CC‑link 口。

优点:兼容旧款 ABB(仅 Profinet)与三菱 CC‑link 网络。
适用:新旧设备混用、改造项目。
二、方案 1:Modbus TCP(推荐,免硬件)
1. 硬件接线
机器人:WAN 口(X86)→ 网线 → 三菱 PLC 以太网口(如 Q 系列内置 ETH)。
网络:机器人与 PLC 同网段(如 192.168.0.X),子网掩码 255.255.255.0。
2. 机器人端配置(示教器)
控制面板 → 配置 → 通讯 → Modbus TCP → 启用。
设为Server(服务器),IP:192.168.0.10,端口:502(默认)。
定义数据区:
保持寄存器(PLC→机器人):如40001–40032(32 字)。
输入寄存器(机器人→PLC):如30001–30032(32 字)。
重启控制器生效。
3. 三菱 PLC 端配置(GX Works2/3)
新建工程 → 配置内置以太网或 Modbus TCP 模块。
网络参数 → 以太网 → 启用,IP:192.168.0.20,网关同网段。
通讯协议支持 → 新建 → 选Modbus TCP。
功能码配置:
03(读保持寄存器):读取机器人 30001 起始数据 → 映射到 PLCD100–D131。
16(写多个寄存器):PLCD200–D231 → 写入机器人 40001 起始。
下载程序,监控通讯状态。
4. RAPID 程序示例(机器人侧)
rapid
MODULE Modbus_Comm
VAR
socketdev sock1; ! 定义Socket
byte buf{12}; ! 收发缓冲区
PROC main()
! 机器人作为Server,监听502端口
SocketCreate sock1;
SocketBind sock1, "192.168.0.10", 502;
SocketListen sock1;
! 循环处理PLC读写请求
WHILE TRUE DO
SocketAccept sock1, sock1;
SocketRead sock1, buf;
! 解析Modbus报文,更新I/O或寄存器
! ...
SocketClose sock1;
ENDWHILE
ENDPROC
ENDMODULE三、方案 2:CC‑link IE(三菱原生总线)
1. 硬件与选项
机器人(IRC5):加装DSQC 378B板卡(X8 端子为 CC‑link 接口)。
ABB机器人 DSQC 378B板卡
机器人(OmniCore):选项3066‑1(主站)/3066‑2(从站)。
三菱 PLC:Q 系列配QJ71C24N‑R2,或 R 系列内置 CC‑link IE。
2. 机器人端配置(RobotStudio)
安装 CC‑link IE 选项与板卡。
配置 → I/O System → 添加 CC‑link IE Master/Slave。
设置站号(如站 1)、波特率(10Mbps)、占用站数(1 站 = 32 点 I/O)。
映射 I/O:
PLC→机器人:CC‑link DI 0–31 → 机器人DI 100–131。
机器人→PLC:机器人 DO 100–131 → CC‑link DO 0–31。
3. 三菱 PLC 端配置(GX Works3)
网络参数 → CC‑link IE → 启用,设为主站(站 0)。
扫描从站(机器人站 1),确认 I/O 长度匹配(32 点入 / 32 点出)。
编程:
读取机器人状态:
FROM H0, K0, D100, K32(CC‑link 输入→D100‑D131)。发送指令给机器人:
TO H0, K0, D200, K32(D200‑D231→CC‑link 输出)。
四、方案 3:Profinet↔CC‑link 网关(跨协议)
1. 硬件连接
机器人(Profinet 从站)→ 网关(如 NT50‑CC‑EN)→ 三菱 PLC(CC‑link 从站)。

2. 网关配置(sycon.net)
新建工程 → 拖入网关 NT50‑CC‑EN → 设置 X2(Profinet)、X3(CC‑link)。
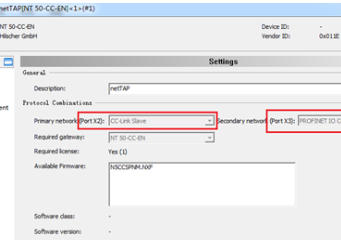
Profinet 侧:导入 ABB 机器人 GSD 文件,设机器人为从站,IP:192.168.0.10。
CC‑link 侧:设为从站,站号 1,波特率 10Mbps。
地址映射:
Profinet 输入(机器人→PLC):PN 0–31 → CC‑link 0–31。
Profinet 输出(PLC→机器人):CC‑link 0–31 → PN 0–31。
3. 机器人与 PLC 侧
机器人:按 Profinet 从站配置(同方案 1)。
PLC:按 CC‑link 主站配置(同方案 2)。
五、通讯调试与常见问题
网络不通:
核对 IP / 子网掩码,直连用交叉线,交换机用直通线。
关闭防火墙,ping 测试连通性(机器人→PLC、PLC→机器人)。
Modbus 寄存器错位:
确认大端 / 小端一致,ABB 默认大端,三菱默认小端,需在程序中交换高低字节。
CC‑link 丢包:
检查终端电阻(首尾站 ON),总线长度≤100m,波特率匹配。
网关映射错误:
严格核对输入 / 输出长度(字节数一致),重启网关与控制器。
六、总结
新项目、低成本:选Modbus TCP,免硬件、易维护。
三菱主导、高速 I/O:选CC‑link IE,原生稳定、实时性强。
旧 ABB(仅 Profinet)+ 三菱:用Profinet↔CC‑link 网关,平滑改造。
